Nuevas funciones SW 5.9
 Webinars
Webinars
|
14:08
El desarrollo constante y la mejora de nuestro producto es vital para nosotros en Universal Robots. Nuestro objetivo constante es seguir ofreciendo el cobot lider, con la interfaz más fácil de usar del mundo. Por ello, desarrollamos y publicamos con frecuencia actualizaciones de nuestro software, incluyendo nuevas funciones o mejorando las existenttes, hasta el punto que puede resultar un reto para nuestros clientes mantenerse actualizados en todas las novedades.
Este webinario se centra en las funciones más importantes incorporadas en la version de Polyscope 5.9
OBJETIVOS PRINCIPALES DEL CURSO
Conocerá las siguientes funciones nuevas:
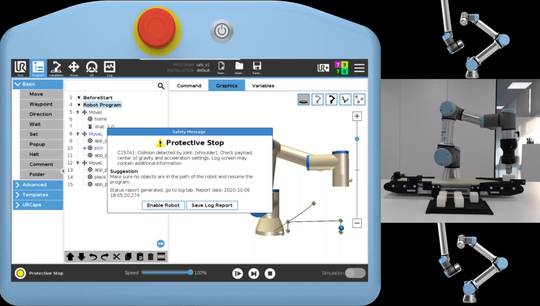
- Activación de salidas y registros para notificar un paro no programado
- Aprender funciones fuera del alcance del robot
- Pausar el programa por código de error
- Advertencia de carga efectiva no configurada y aviso de desgaste excesivo
INFORMACIÓN PRÁCTICA
Le sugerimos instalar nuestro simulador offline URSim para que pueda prácticar por si mismo algunas de las funciones que le presentaremos durante el webinario.
URSim funcinona bajo Linux. Si es usted usuario de otro SO, para usarlo necesitará una máquina virtual.
Consulte nuestra guía paso a paso para obtener instrucciones detalladas sobre cómo instalar URSim.
Recibirá el enlace para atender a este webinario en un correo electrónico aparte. En caso de que no le llegue este correo, por favor verifique su filtro de correo no deseado.
Le recomendamos usar Chrome como navegador para acceder al webinario para un mejor resultado